

Performance of the deep learning algorithms are mainly dependent on the amount of the sample data set been used for the training. Accuracy of these algorithms improves with the more data sets. Unsupervised learning and semi supervised learning will counter this problem of dataset, but we would not have this technology matured enough to be used in ADAS in near future. Supervised learning is a need an hour, and focus should be more on getting more datasets for better performance of algorithms.
Most traditional way of obtaining the dataset is time consuming and through offline data storage. Typically a car PC would be used to record the dataset, and only when the car return to destination then the recorded dataset will be available for training algorithms.

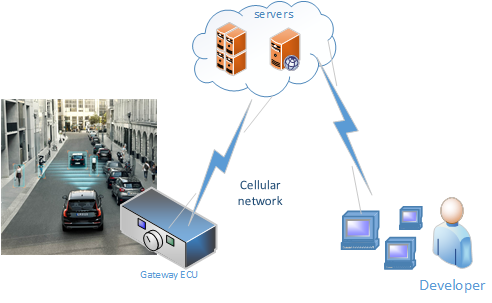
Sensors uploading the live sample dataset (video sample) from the cars to cloud, will be a huge benefits for engineering team because
- Datasets are available in real time for training the algorithms
- More probability of getting the corner/edge cases for the algorithms, since the car would be driven in real time environment
- Developer could analyse the performance/issues of the algorithms in real time, and accordingly fix/update if necessary
- data mining and classification can also be done in real time
Training algorithms in real time

But the downside of this solution is that there will be a huge dataset uploaded to cloud and also the classification of these datasets would be problem because of unsupervised recording. This problem can be addressed by enabling the recording only when the driver desires to or when the car passes through the point of interest or when programmed events occur.

More and more the training datasets are made available, the output performance of algorithms increases.


You must be logged in to post a comment.